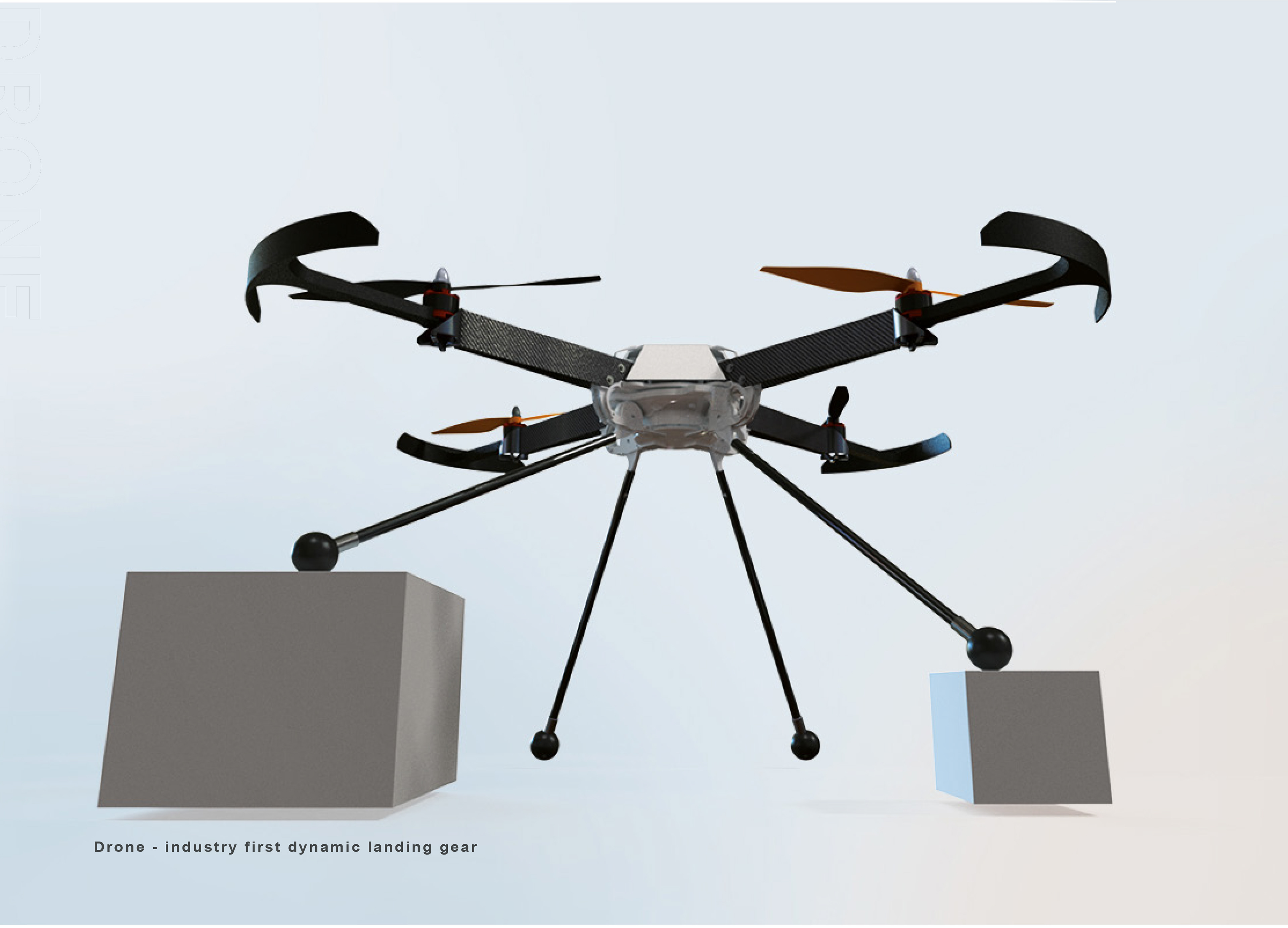
The impetus of this project was manufacturability, with a focus on designing a drone to be produced as a run of 100,000 (a brief set by Brunel university design department) and to be completed by a team of 5 Brunel students. It also had to have a unique feature to add complexity to our design and manufacturing considerations. For this unique feature we identified that there was no drone in the current market (2017 market) that could land on any solid surface. The only offerings had to be landed on flat/relatively flat ground.
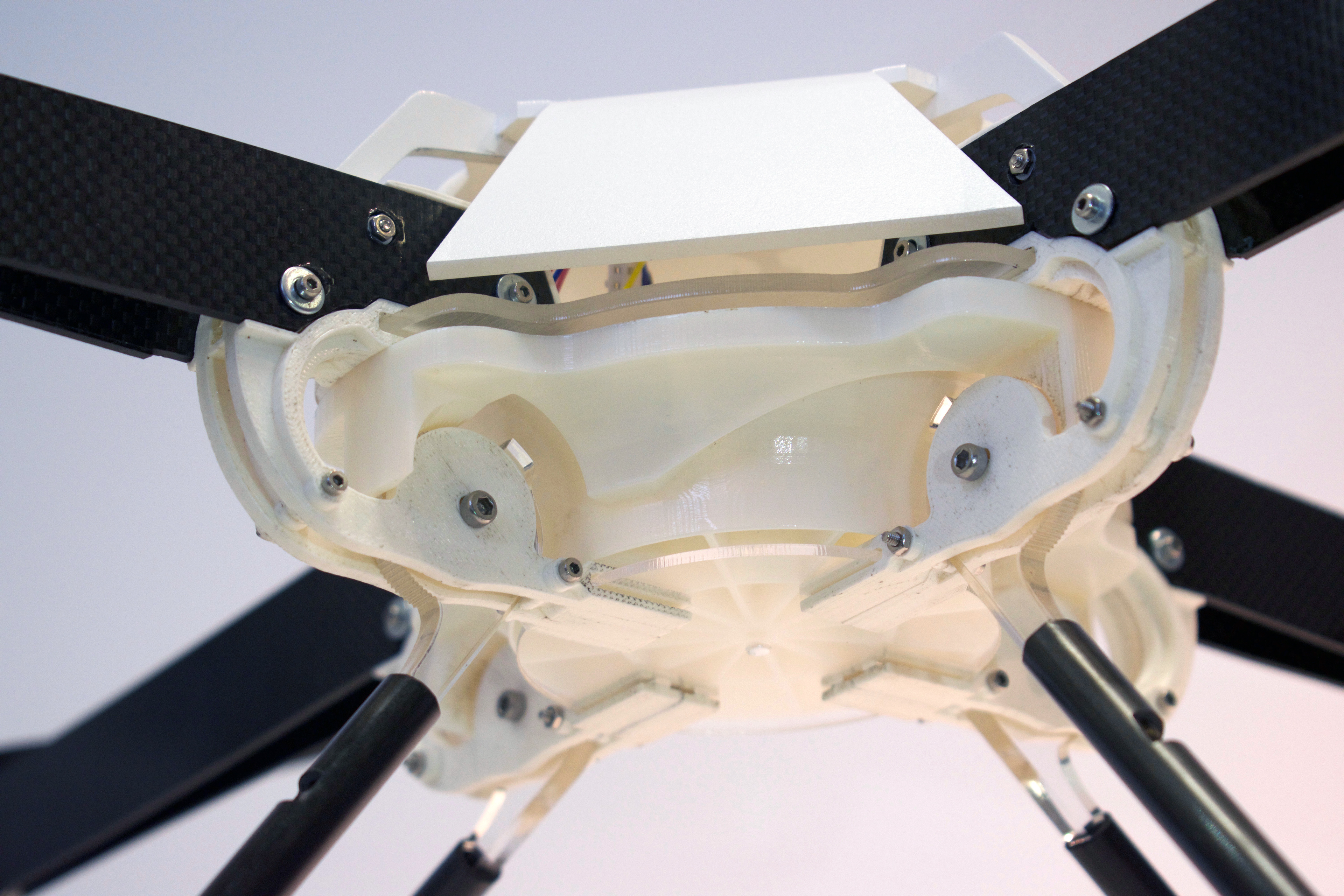
The multi axial cam was designed and 3d printed so that the legs could be lifted to the same height after take off (for stability purposes), and then dropped to any level and locked in place when landing is initiated. This whole mechanism was made up of 5 parts and required only a stepper motor to operate.
Although difficult to explain in words, the mechanism worked flawlessly, although the drone was never flown, only static tests were run. The components were also designed to theoretically be injection moulded.